 火星网校
火星网校
人物角色绑定之脚部基本设置
本节的主要内容是对角色的脚部进行设置。
一、设置腿部IK
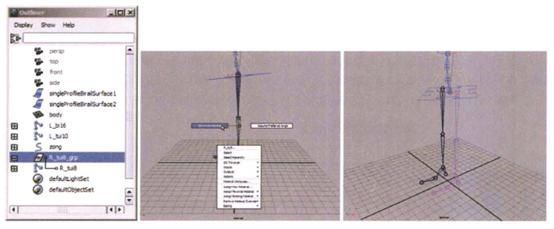
Step01 打开上一节完成的场景文件“手臂跟随设置”。打开大纲,将R_ _tui8打组并重新命名为R_ tui8_ grp, 如下图(左)所示。
Step02 选择角色腿部的R_tui9骨骼,使用旋转工具将它沿x轴正方向旋转一定的角度,然后在该骨骼上单击鼠标右键,从弹出的标签菜单中选择Set Preferred Angle(设置优先角)选项,这样可以限制小腿弯曲的方向了,如下图(中)所示。
Step03 设置好优先角度之后,在通道盒中将R_tui9骨骼的旋转角度重新归零。
Step04 在动画模块下单击Skeleton>IK Handle Tool>口(骨骼>IK手柄工具>口)打开选项面板,设置Current solver (当前解算器)为ikRPsolver, 然后在角色腿部的R_tui8和R_ jiao10骨骼上依次单击鼠标左键,这样就创建了腿部的IK,如下图(右)所示。
二、创建腿部定位器
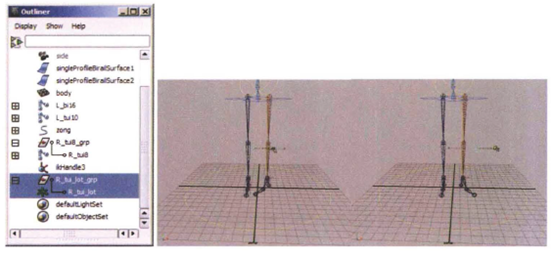
Step01 单击Animation (动画)工具架上的*按钮,创建一个定位器locator4,先按V键将它吸附到腿部的R _tui9骨骼关节中心上,然后再用移动工具将它沿z轴正向移出腿部骨骼,如下图所示。
Step02 在大纲中将locator4重新命名为R_ tui_ lot, 将其冻结变换,然后进行打组,并将组重新命名为R_ tui_ lot_ grp,如下图(左)所示。
Step03 选择R_ tui_lot定位器,加选ikHandle3, 执行Constrain>Pole Vector (约束>极向量)命令,创建一个极向量约束,这样在移动该定位器时,腿部也将跟随移动,如下图(右)所示。
三、创建脚部控制器
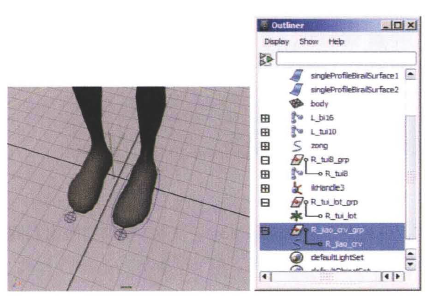
Step01 创建一个CV圆环nurbsCircle2, 并将其平移到脚掌的位置处,同时根据脚掌的形状(在层编辑器中将leyer1显示出来即可观察到角色模型)来调节圆环的形状,如下图(左)所示。
Step02 在大纲中将nurbsCircle2重新命名为R_jao_ crv, 然后将其打组,同时将组重新命名为R_ jiao_crv_ grp,如下图(右)所示,最后将R_ jiao _crv冻结变换,这样脚部的控制器就制作完成了。




上一篇 人物角色绑定之脚部拉伸设置
下一篇 人物角色绑定之手臂跟随设置(二)
-

2101期学员李思庭作品
-

2104期学员林雪茹作品
-

2107期学员赵凌作品
-

2107期学员赵燃作品
-

2106期学员徐正浩作品
-

2106期学员弓莉作品
-

2105期学员白羽新作品
-

2107期学员王佳蕊作品
热门课程
专业讲师指导 快速摆脱技能困惑


相关文章
多种教程 总有一个适合自己专业问题咨询
你担心的问题,火星帮你解答-
可灵年化5亿美元谷歌带队出海安徽举办省级漫剧大赛AI设计日报0623
可灵正推进从快手分拆独立运营,内部方向为2027年初递交港股上市申报 来源:上海证券报(2026-06-17) AI短剧"产......
-
火星时代
-
腾讯又放大招这款AI工具让游戏美术效率提升300是真革命还是噱头
但对于追求极致细节的资深原画师来说,自动化程度高也意味着部分控制权让渡,需要适应 实测体验:响应速度确实惊艳,比传统生图的等待......
-
2026年,AI短剧早已不是"写一段提示词等生成"的粗放阶段真正拉开差距的,是谁先把从立项到出片的整套工业化流程跑通 过去做A......
-
什么是负面提示词? 在AI绘画中,我们通常用正向提示词告诉模型想要什么——比如"一个穿红色连衣裙的女孩站在海边"这时候你需要一......
-
做AI漫剧最头疼的是什么?不是剧情写不好,不是场景出不来——是角色脸上的表情 想写角色开心,只会一句"他开心地笑了";想写难过......
