 火星网校
火星网校
四足角色绑定之角色腿部绑定
在前两节中已经创建了四足动物的骨骼及控制器,这是绑定的前提条件,本节将介绍角色整体绑定的过程。
一、腿部绑定
为骨骼添加IK手柄。
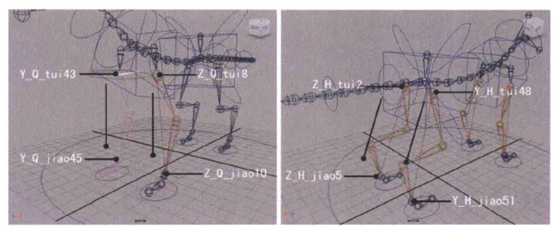
Step01 打开上一节完成的场景文件。切换到Animation (动画)工具架,双击(创建IK手柄)按钮,打开Tool Settings (工具设置)窗口,在Current solver (当前解算器)中选择ikRPsolver,然后先后单击角色的Z_ Q _tui8骨骼,再单击Z_ Q jiao10骨骼,为其左前腿骨骼创建IK,右前腿同理,如下图(左)所示。
Step02 用相同的方法为后腿骨骼也创建好IK,如下图(右)所示。
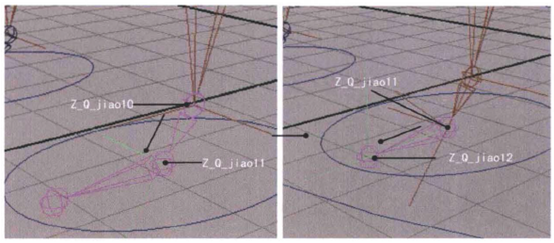
Step03 为脚部骨骼添加ikSCsolver类型的IK。首先为左前脚添加IK,选择IK Handle Tool ( IK手柄工具),分别单击Z _Q _jiao10关节和Z_ Q_jiao11关节,然后按G键(不必再次执行IK Handle Tool命令即可继续创建IK),再次单击Z_Q _jiao11和Z_Q_jiao12关节,这样左前脚的两个IK就创建好了,如下图所示。
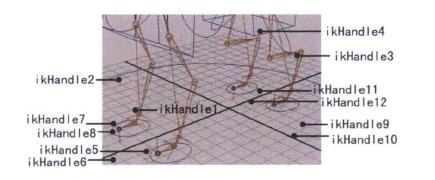
Step04 用相同的方法将其他3只脚的IK也全部创建出来,创建之后的效果如下图所示。
对腿部进行简单绑定。
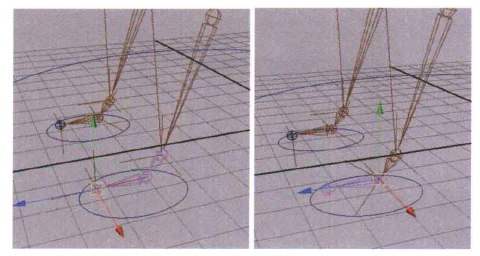
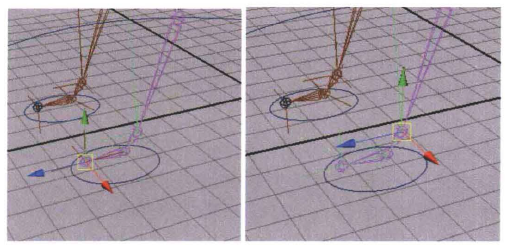
Step05 首先绑定角色的左前腿。打开Outliner (大纲),选择ikHandle1,按Ctrl+G键进行打组,生成group1,然后配合使用D键和V键将ikHandle1的中心轴移动并吸附到左前脚的Z_Q _jiao11关节上,如下图(左)所示。
Step06 选择ikHandle5,按CtrI+G键进行打组,生成group2,同理将它的中心轴移动并吸附到左前脚的Z_ Q jiao12关节上,如下图(左)所示。继续选择ikHandle6,按Ctrl+G键进行打组,生成group3,将它的中心轴移动并吸附到左前角的Z_ Q_ jiao11关节 上,如下图(右)所示。
Step07 选择group1和group2,按CtrI+G键进行打组,生成group4,按住D键和V键将其中心轴吸附至左前脚的Z_ Q_ jiao12关节上,如下图(左)所示。继续选择group3和group4,按CtrI+G键打组, 生成group5,按住D和V键将其中心轴移动并吸附到左前脚踝关节的Z_ Q _jiao10关节上,如下图(右)所示。
Step08 选择group5,再次打组生成group6,然后选择group6,按住Shift键加选左前脚控制器Z _Q _jiao_crv,按下键盘上的P键,将其设置为Z_Q_jiao_crv的子物体。这样角色的左前腿就绑定完成了,移动脚部控制器Z_ Q _jiao_crv, 腿部就可以跟随运动了,效果如下图所示。
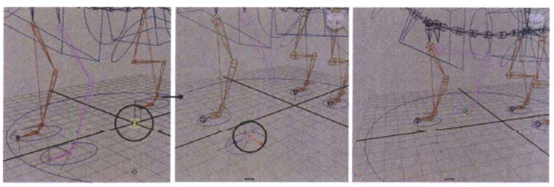
Step09 同理,按照Step05~ Step08的方法对其他3条腿执行相同的操作,具体的操作步骤就不再赘述,绑定完成之后调节角色的根骨骼gen1测试一下, 效果如下图(左)所示。
Step10 为腿部添加极向量。单击Animation (动画)工具架上的*按钮,为角色的4条腿分别创建4个定位器,并放置在下图(中)所示的位置处,同时将其冻结变换并删除历史,最后在大纲中将其放置在crv_ grp层级之下,如下图(右)所示。
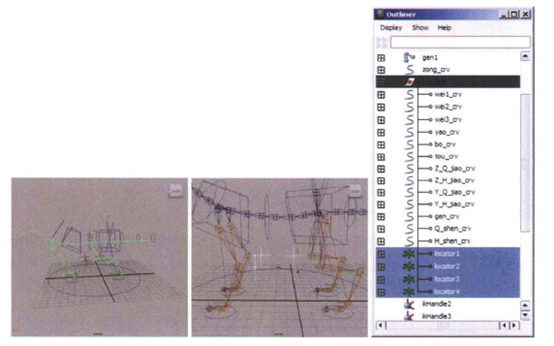
Step11 设置极向量约束。选择左前腿的定位器locator1,按住Shift键加选ikHandle1,在Animation (动画)模块下执行Constrain>Pole Vector (约束>极向量)命令,对其他3条腿做相同的设置,设置之后的效果如下图(左)所示。
如果需要为角色添加如脚尖抬起、脚跟抬起或旋转之类的动作,可以通过为控制器添加属性的方法来实现,该功能在“人物角色综合绑定技术”中有具体讲解,这里仅做简要说明。
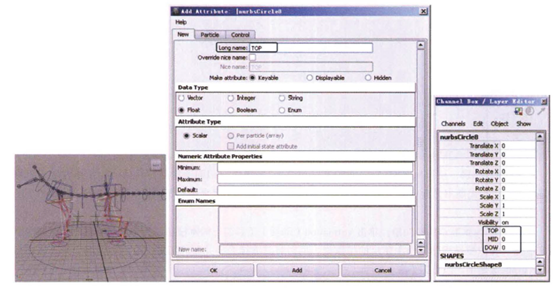
Step12 首先为左前脚添加属性。选择左前脚控制器Z_ Q_ jiao_ crv, 在通道盒中执行Edit> Add Attribute(编辑>添加属性)命令,在弹出窗口的New (新建)标签中设置Long name (长名称)为TOP,如下图(中)所示,单击Add (添加)按钮完成操作,同理再为该控制器添加名称为MID和DOW的两个属性,添加完成之后会在通道盒中显示出来,如下图(右)所示。
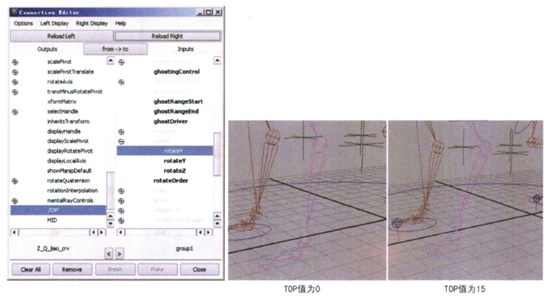
Step13 执行Window>General Editors>Cnnction Editor (窗口>常用编辑器>连接编辑器)命令,打开连接编辑器窗口,将Z_ Q _jiao_ crv控制器加载到左栏中,然后在大纲中选择Z_ Q _jiao_ _crv 下的group1,并将其加载到连接编辑器的右栏中,将左栏的TOP属性与右栏的rotateX属性( x轴为脚跟抬起落下时的旋转方向)进行连接,如下图(左)所示。
Step14 左栏保持不变,将group4加载到右栏中,同理将左栏的TOP属性与右栏的rotateX属性进行连接,连接好之后选择角色左前脚的控制器Z_Q_jiao_crv, 然后调节通道盒中的TOP属性值,观察脚部的运动效果,如下图(右)所示。
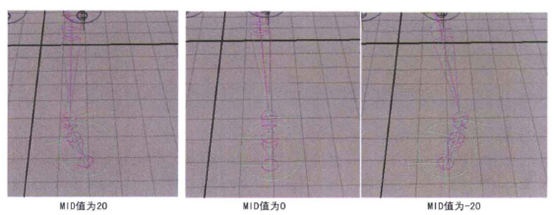
Step15 下面通过MID属性来实现脚部的左右旋转。连接编辑器的左右栏均保持不变,将左栏的MID属性与右栏的rotateY属性进行连接,连接好之后选择角色左前脚的控制器Z_ Q_ jiao_ crv, 然后调节通道盒中的MID属性值,观察脚部的运动效果,如下图所示。
Step16 下面通过DOW属性来实现脚尖部的上下旋转。连接编辑器左栏保持不变,将group5加载到右栏中,然后将左栏的DOW属性与右栏的rotateX属性进行连接,连接好之后选择角色左前脚的控制器Z_ Q_jiao_crv,然后调节通道盒中的TOP属性值来测试脚尖部的运动效果是否正确。
这里仅为左前脚添加了TOP、MID和DOW3个属性,读者可根据实际需要自行为脚部添加更多的细节控制属性,这里不再详细介绍。




下一篇 四足角色绑定之设置角色控制器
-

2101期学员李思庭作品
-

2104期学员林雪茹作品
-

2107期学员赵凌作品
-

2107期学员赵燃作品
-

2106期学员徐正浩作品
-

2106期学员弓莉作品
-

2105期学员白羽新作品
-

2107期学员王佳蕊作品
热门课程
专业讲师指导 快速摆脱技能困惑


相关文章
多种教程 总有一个适合自己专业问题咨询
你担心的问题,火星帮你解答-
为给新片造势,迪士尼这次豁出去了,拿出压箱底的一众经典IP,开启了梦幻联动朱迪和尼克奉命潜入偏远地带卧底调查 截至11月24日......
-
此前Q2问答环节,邹涛曾将《解限机》首发失利归结于“商业化保守”和“灰产猖獗”,导致预想设计与实际游玩效果偏差大,且表示该游戏......
-
2025 Google Play年度游戏颁奖:洞察移动游戏新趋势
玩家无需四处收集实体卡,轻点屏幕就能开启惊喜开包之旅,享受收集与对战乐趣库洛游戏的《鸣潮》斩获“最佳持续运营游戏”大奖,这不仅......
-
说明:文中所有的配图均来源于网络 在人们的常规认知里,游戏引擎领域的两大巨头似乎更倾向于在各自赛道上激烈竞争,然而,只要时间足......
-
在行政服务优化层面,办法提出压缩国产网络游戏审核周期,在朝阳、海淀等重点区将审批纳入综合窗口;完善版权服务机制,将游戏素材著作......
-
未毕业先就业、组团入职、扎堆拿offer...这种好事,再多来一打!
众所周知,火星有完善的就业推荐服务图为火星校园招聘会现场对火星同学们来说,金三银四、金九银十并不是找工作的唯一良机火星时代教育......
